
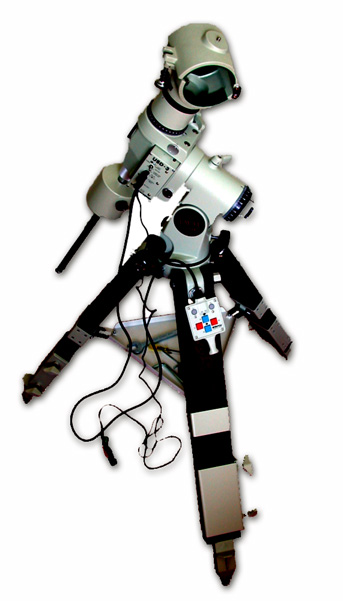
高桥EM-11 USD-3赤道仪
>>结构和电路 2007-1-15
>>EM11拆解 2007-11-24
- 开关
COMPUTER STANDBY开关接通(变压)5V电源,用于所有的控制部分;MOTOR开关将12V电源与电机接通。

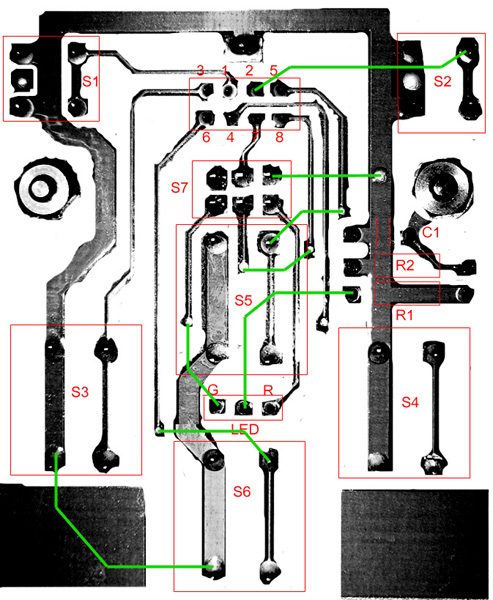
- 控制手柄
控制手柄线路正视图为:
从线路上看插座#8应该是5V,待确认。另外粗地线成环,有点费解。C1/R2应是用来连接外壳。均为开关控制。
- 串口
USD3型不带编码器,不支持GOTO功能。面板上保留了RS232的插座,相信是为了使用统一的线路板和外壳。从TEMMA的控制协议上看高桥的赤道仪控制通信采用查询的方式。
USD3赤道仪的驱动电路板与TEMMA的相同。Temma编码开关ss1各位位置相同,而USD3的第2位拨出。将ss1开关第2位拨回,则电路板以temma的模式运行,只是没有编码器的输入,反馈的位置总是不动。http://www.well.com/~richardl/astro/temma/有temma的控制协议。
将USD3的第2位开关拨回,用THC试验,连接和操作正常。只是无反馈,不能进行GOTO。THC需要外接电源,RS232接口不含电源。
- 控制指令
波特率:19200
数据位:8
奇偶校验:EVEN
停止位:1实际使用到的指令只有(均以13,10结束)
1)赤经赤纬修正速度设置指令
LAXX,DECXX。xx为速度,取0-99
2)电机运转
MX。X:8位。含义为(LSB -MSB)0: SPEED 1:RIGHT 3:UP 4:DOWN 5:ENCODER 6:1 7:0
必须持续发送驱动指令才可维持转动。使用指令控制的好处是不会因为高低速的设置不当而出现误操作。
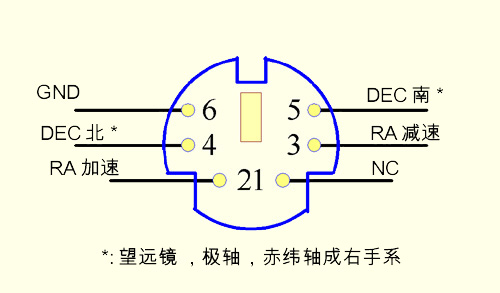
- 导星接口
一个6芯MINI DIN插座,使用其中5个触点,采用5v电平控制,低电平有效。如果赤经或赤纬方向的2个触点同时接地,则工作不正常。
如果使用手柄切换到高速(HS)模式,则调整在高速模式下进行。总之,这4个触点可以模拟手柄上四个方向按键的工作。
现有的webcam导星软件加电平输出后可以直接使用。
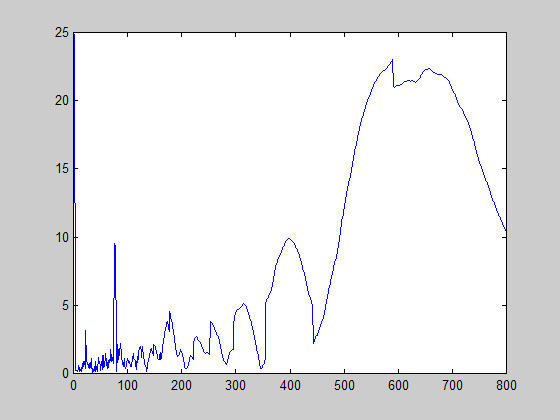
- 跟踪精度
对赤经误差分析,有三个明显的周期项。一是早已注意到的76秒周期,二是蜗轮的600秒周期(陡降是积分区间从3个周期减到2个周期的缘故),最后一个400秒的周期从何而来尚不知道。这是一个很一般的水平,可能与蜗轮较小有关。
- 三角架
三角架中间原来是一个三角形的铁板来固定,拆装很不方便。使用中发现这个架子有点矮。
- 极轴
