
自动导星跟踪
在连接RS232后,可以实现更精细的调整。
[2006-09-28]
将新电路试验板做好。28日赴麻峪房观测,试验串口控制下的导星。导星逻辑是:每4秒钟读一次偏差(6次和),偏差像素值除以6(赤经)和8(赤纬)取整后乘以5%修正量。实际赤道仪的修正时间大致在2秒。
从照片上看跟踪误差在3个像素。后半夜有风。中间有过一次快门时序错误。

为了减小星像晃动的影响,加入数字积分功能,即先将导星图案叠加后再测量位置。将新的2051控制板做好,并编写了一个20D的控制元件放到验证程序里。
现在采用的导星逻辑是
float x,y;
x=last_ra_bias;
y=last_dec_bias;
//由cali得到方向,也可通过corr_ra/dec符号设置
if(ra_ratio>0) x=-x;
if(dec_ratio>0) y=-y;
x/=corr_ra;
y/=corr_dec;
//求整。corr_ra/dec可认为是开始修正的阈值,step是修正速度步长
ra=x>0?floor(x):ceil(x);
dec=y>0?floor(y):ceil(y);
ra*=corr_ra_step;
dec*=corr_dec_step;
//限速
ra=min(15,max(ra,-15));
dec=min(15,max(dec,-15));
在间接驱动时速度被映射到 int lcmd[16]={0,2,4,6,8,10,15,20,30,40,50,60,70,80,90,99}几个值上面。
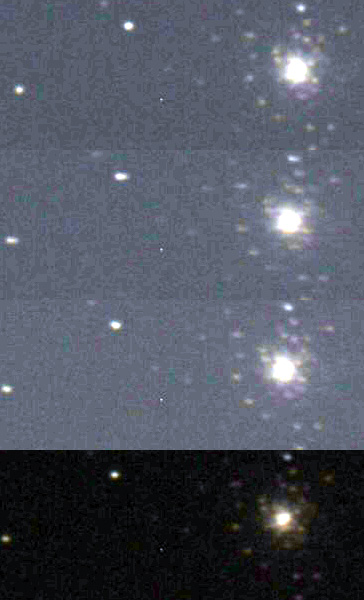
10月28日天气晴好,赴麻峪房观测游玩。29日凌晨拍摄了M77和M78,同时对误差进行记录。使用适配接口。
在对M78的拍摄中,星象偏差在3像素左右,即6角秒。整晚没有出现震荡的情况。

3:33:48 : Set Tracking: Step 5 5 Ratio 6 8 Interval 3000
从偏差记录(3秒步长)上可以看出,10分钟的误差校正得较好。但短周期的起伏很大。
对频谱做分析,76秒周期依然存在,幅度较低是因为相位变化剧烈。更小周期的起伏明显。
同时,赤经偏差序列的相邻项差标准差增大到12.5,赤纬减小到5.3。
现在的跟踪方式是每3秒反馈一次,而赤道仪的调速是脉冲式的,2秒左右就会恢复原状。这样,可能造成了摇摆,所以还需要改进导星逻辑,至少采用持续匀速调节的方式。是否仅对10分周期做补偿就行了?
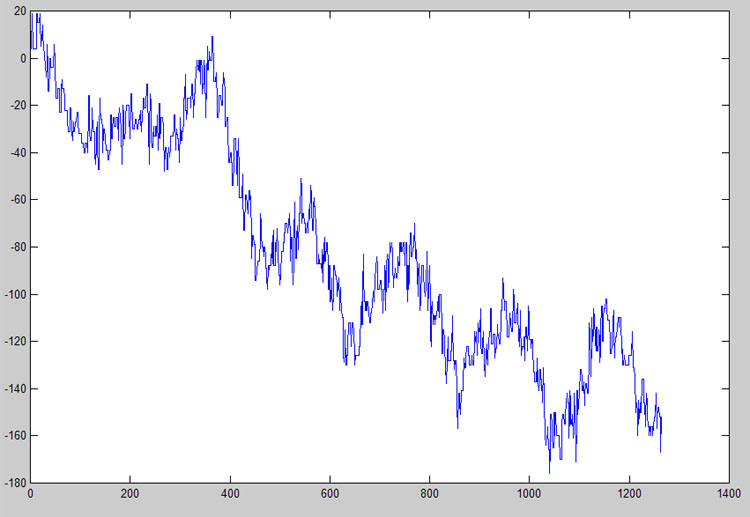
下图是赤经方向补偿指令累计曲线。可以看出加快(ra<0)的和大于减慢和,即两边比例不完全一致。
[2006-11-4]
一天风,晚上极晴,有云。北落师门比较连续和断续调整效果。直连。连续跟踪,中间改变参数,共4次。中途去57中。回来后继续试验了3组,但均有云干扰。注意是赤道仪直连,所以实际调整量(5,10)和经单片机(4,10)后不同,调整量更大。
[2006-11-5]
家中,目标北落师门比较连续和断续调整效果。赤道仪直连,为了模拟间接驱动的效果,在3秒断续调整时将调整量映射到分立值上:
if(flag_test){
int lcmd[16]={0,2,4,6,8,10,15,20,30,40,50,60,70,80,90,99};
int cmd=15;
while(lcmd[cmd]>ra){
cmd--;
}
ra=lcmd[cmd];
}
风大。与昨天相比,将断续的步长改为4。两者的标准差接近,相邻项差的标准差连续的较小,但是否和采样间隔2秒/3秒之区别有关。另外,在间隔减小到2秒后,赤纬的调整参数亦需改变。总体来说,似觉连续修正至少不劣于断续方式。
| Ave | Interval | Ratio | Step | RA std | dRa std | Dec std | dDec std | |
|---|---|---|---|---|---|---|---|---|
| 20061029驱动 | 6 | 2 | - | - | - | 7.51 | - | 6.06 |
| 20061029M78跟踪 | 6 | 3 | 6 8 | 5 5 | 9.42 | 12.52 | 6.88 | 5.32 |
| 20061029M77跟踪 | 6 | 3 | 6 8 | 5 5 | 8.93 | 11.82 | 5.18 | 4.42 |
| 20061104断续1 | 6 | 3 | 6 8 | 5 5 | 8.69 | 11.20 | 6.28 | 7.55 |
| 20061104连续1 | 6 | 2 | 5 8 | 2 5 | 7.49 | 7.28 | 5.65 | 6.06 |
| 20061104断续2 | 6 | 3 | 6 8 | 5 5 | 8.55 | 11.09 | 6.23 | 7.06 |
| 20061104连续2 | 6 | 2 | 5 8 | 2 5 | 7.52 | 6.88 | 5.69 | 5.68 |
| 20061104-1 | 6 | 3 | 6 8 | 5 5 | 9.41 | 13.84 | 8.66 | 10.48 |
| 20061104-2 | 6 | 3 | 6 8 | 5 5 | 8.68 | 11.55 | 9.51 | 10.21 |
| 20061104-3 | 6 | 2 | 5 8 | 2 5 | 8.77 | 10.04 | 6.65 | 7.69 |
| 20061105断续1 | 6 | 3 | 6 8 | 4 5 | 7.99 | 9.36 | 7.40 | 7.14 |
| 20061105连续1 | 6 | 2 | 5 8 | 2 5 | 8.03 | 7.36 | 6.73 | 6.68 |
| 20061105断续2 | 6 | 3 | 6 8 | 4 5 | 8.94 | 10.10 | 7.42 | 7.93 |
| 20061105连续2 | 6 | 2 | 5 8 | 2 5 | 8.92 | 7.94 | 9.47 | 6.83 |
[2006-11-9]
为在拍摄水星时摆脱笔记本,修改了一下相机控制手柄,使之可以向适配器发送指令。当接上笔记本测试时,发现最后对焦解除指令有接收错误(转成赤道仪控制指令)的现象,当时判断是奇偶未设的缘故,时间紧未深究。
当晚皓月当空,天气也甚晴。但是大气宁静度极差,调焦似找不到焦点。背景光很亮,所以拍摄M79,因其为球状星团,所以影响会小些。为试验导星精度,ISO设在100,以保持10分钟的曝光时间。
在拍摄了5张照片后,到了三点多。这时觉得星像不实,于是重新调焦。
约摸调好之后,再次自动拍摄。此时出现问题:相机快门开启后约一秒钟随即关闭,而程序本身仍处在计时状态中。试验数次均如此。注意到在9月28日和10月22日均出现过类似的情形:
1)表现为相机控制时序错误
2)发送相机控制指令,赤道仪快动
3)在导星(发送调整指令)下,相机误动作
以上现象均可以用指令错乱解释。好在带了新的相机控制手柄,导星用笔记本直接连接赤道仪,定时拍摄用手柄接到转换器上,没有“误事”。
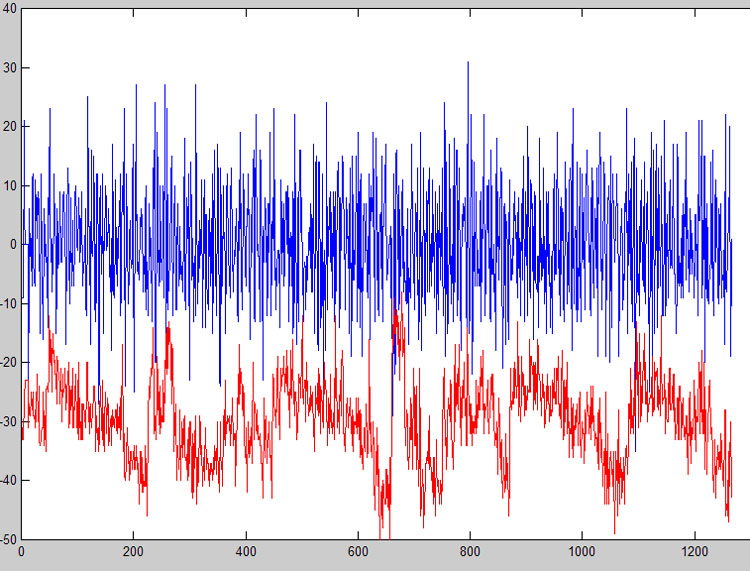
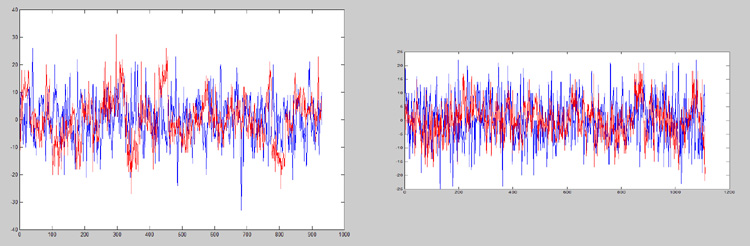
连续拍摄直到天亮。检查一下,大失所望,星像竟有摆动(右图。连续拍摄。20061109041826-045607.pec:Std(RA) Std(dRA) 7.9888 7.7589 Std(DEC) Std(dDEC) 6.3651 6.101)。比较令人担忧的是从偏差记录显示上看不出明显的问题,也就是这个监测无法反映跟踪质量。而意外的是前面拍摄的5张照片(左图。中间察看过。部分20061109041826-045607.pec:Std(RA) Std(dRA) 7.8442 7.2151Std(DEC) Std(dDEC) 8.4426 5.9012)虽然由于大气抖动而星点不实,但跟踪很理想。

[2006-11-13]
检查了一下程序,发现20D程序中发送指令缓冲数组的指针复位不对,所以可能会多发送128个乱码。这可以解释1、2两条。但3条的原因未知,为什么在单独跟踪和直接控制后跟踪差了许多。在转换器中加入指令回送功能做监测。
[2006-11-15]
分析11月9日数据。前5张中后3张的偏差和后4张的对比,感觉相差不多,甚至前者更差。怀疑是USB电缆张力所致。
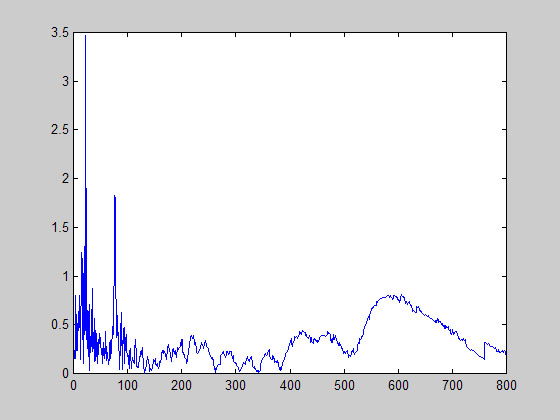
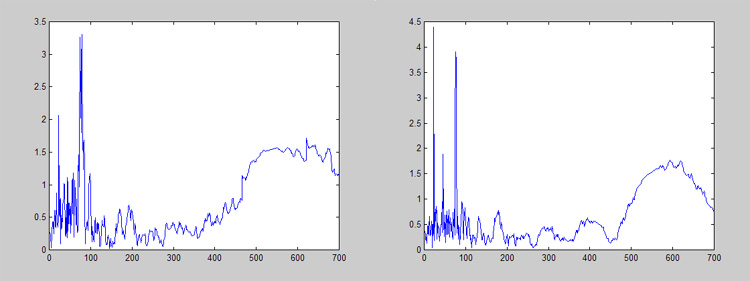
频谱均在23秒左右有一个峰值。但后4张的的强度明显比前3张大。
[2006-12-03]
天气晴好,明月高悬。在阳台上做了一次测试。目标猎户epsilon。5张10分钟照片,ISO100。4张叠加可见15.4等恒星。基本设置Set Tracking: Step 2 3 Ratio 5 6 Interval 2000,感觉结果还行。其他操作未出现问题。

在改造EM11线路板时将电机取下重新安装,没有任何的定位机构,尽量使得齿轮咬合紧密。6、7号夜间天气晴好,有月亮,做一下测试。导星逻辑修改为监测偏差的移动平均值,采用固定的修正速度。从图上看偏差较大,从照片上看似乎还可以。
6日M41单张,可见13等星。

7日在赤经曲线上发现一个大的尖峰,怀疑是粘在齿轮上的碎屑所致。
拍摄