赤道仪周期误差
赤道仪的跟踪精度是最令人关心的问题。
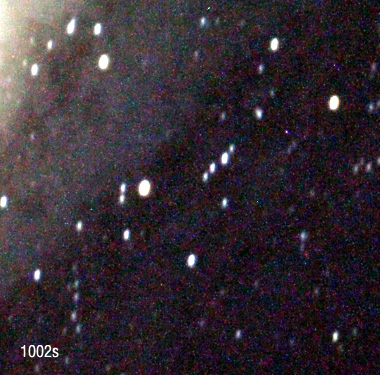
05年11月28日在八达岭用FS78直焦自动跟踪拍摄M31,共3张。第一张10分钟的跟踪误差3个像素左右:
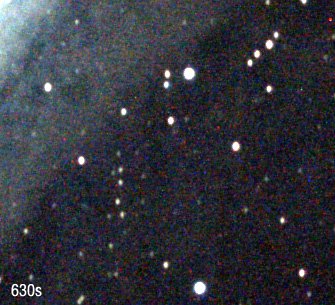
接下来的16分钟照片误差是比较大的,达到9个像素,可能有晃动:

第三张16分钟的误差在6个像素左右:
经过这两次的试验可以估算出EM11的大致精度。下一步要测量一下误差是累积性的还是短周期性的,如果是前者,只要定时修正就可以改善精度;否则,就要周期性的补偿,会麻烦些。
详细的测量:
测试方法:以WEBCAM接于FS78主焦点,320X240分辨率(约4"/像素)。以SKYSTEPPER程序导星状态记录星点偏离轨迹。
12月5日晚结果。
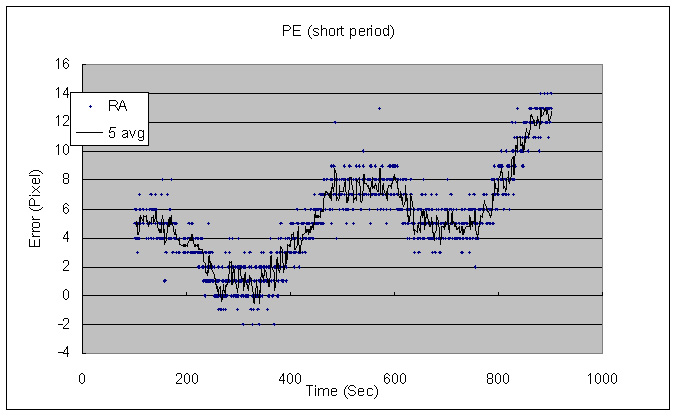
风大,星像抖动变形频繁。做10点平均可见明显周期性误差。幅度约3个像素,即12角秒左右。误差周期77秒。
12月11日,天气好了些,风不太大。再次测量,基本上还是77秒周期的3像素偏差:
用控制器做了一个原理性的PEC装置,通过AUTOGUIDE接口做周期性微调。试验时发现这个接口平常为5V电平,调整时为0电平。
做PEC设置:75秒周期,加减速微调各5次,每次1秒。EM11设置微调为1.1,0.9倍速,即每次调整1.5角秒。试验中每150秒调整一次相位,可以观察到补偿效果的变化:
在程序中加入偏差轨迹显示功能,在13日和14日晚又做了测试,对结果有些迷惑。
13日晚试验PEC,设置为77秒周期。中间较大地调整一次相位,再调回来。总共20分钟左右,基本上是一条直线。然而在前面使用自动驱动时有较大的起伏,而PEC是无法校正的,却没有显示出来。
12月14日测试。先测赤道仪自动驱动偏差,可见长周期波动;然后(右边)先是尝试调整PEC,根据偏差最终确定相位后开启PEC。在这个近20分钟的过程中却未见大的起伏。
接着关闭PEC,自驱20分钟,调整赤纬,再打开PEC,这时的补偿效果很小,可能相位偏差过大。同时发现一个巨大的弯曲。
不解之处:
1)误差周期约为77秒。几次测量结果较一致。我简直怀疑是不是140牙的蜗轮了。
2)是否存在一个更长周期的更大的误差。
3)开启PEC后赤经似有均匀的加速,可能是快慢补偿时虽然持续时间相同,但实际位移不同的缘故。
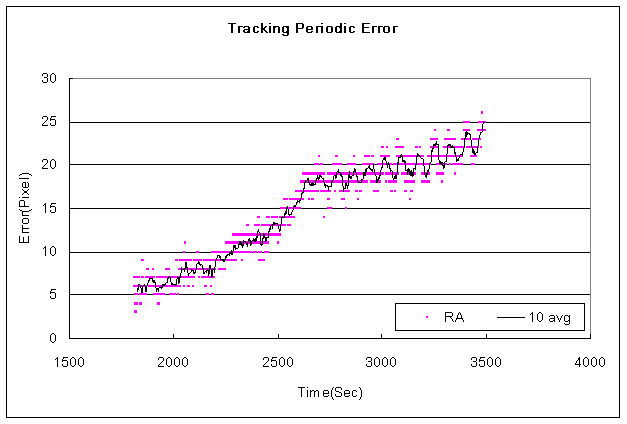
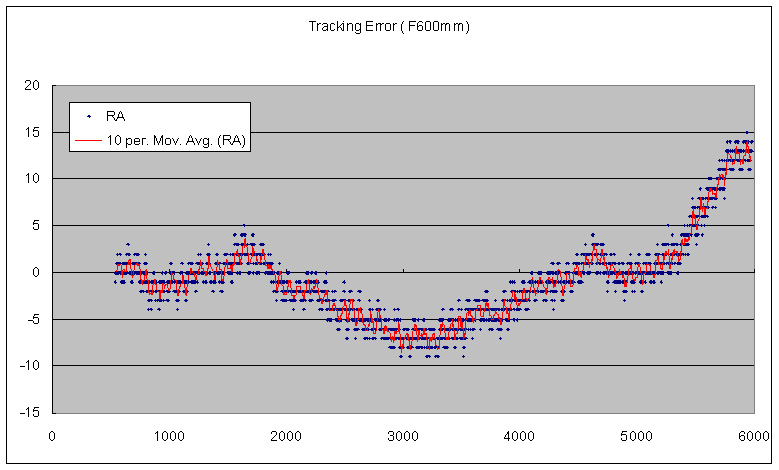
12月15日对自制赤道仪测量。此赤道仪采用两级蜗轮减速,减速比分别为216(主蜗轮)和40(次蜗轮),每齿的周期分别为400秒和10秒。
下图可见明显的400秒PE,幅度30多角秒。次级的摆动不明显。
这架赤道仪PE的形状很规则平缓,非常便于PEC补偿。这主要得益于两级蜗轮减速的设计。与齿轮组减速相比,误差曲线平滑得多。
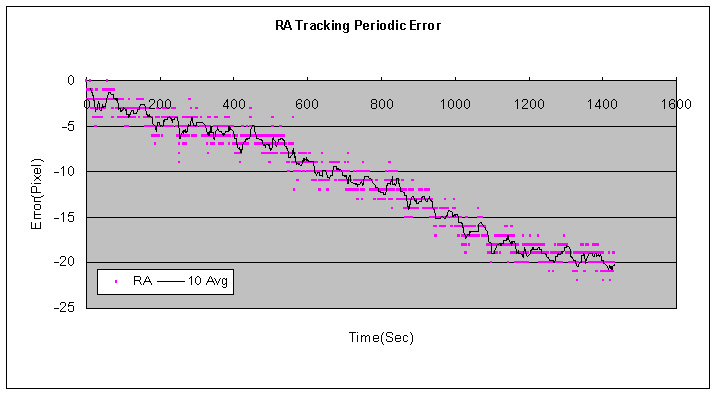
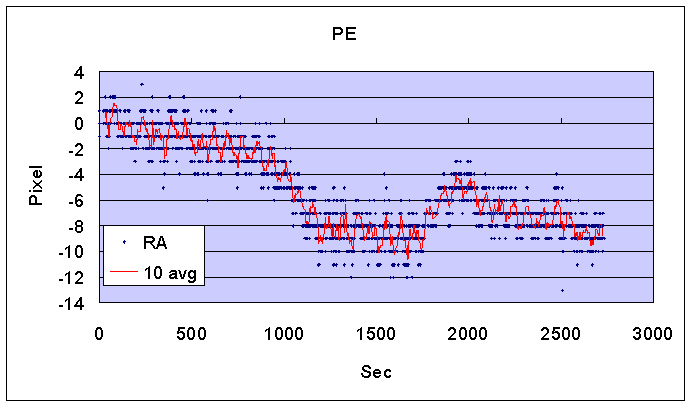
12月22日。用700/60镜子测量。小周期76.70秒。
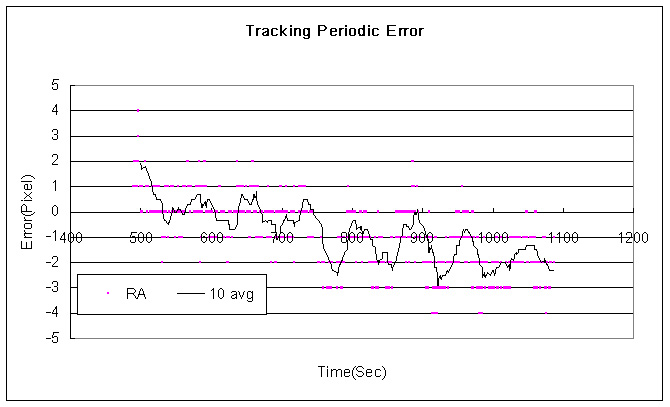
10点平均:以320X240分辨率测量,反馈周期5.5秒。小周期76.15秒。
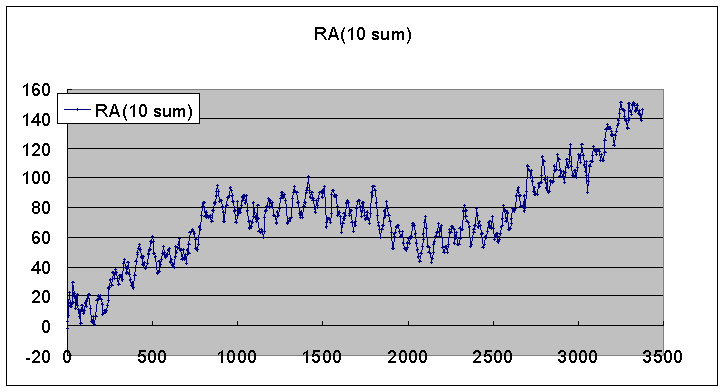
现在EM11的精度比较清楚了。短周期误差幅度在8角秒,周期76.5秒。长周期误差幅度在40角秒,周期1小时以上。感觉这是一个很一般的水平,可能与蜗轮较小有关。
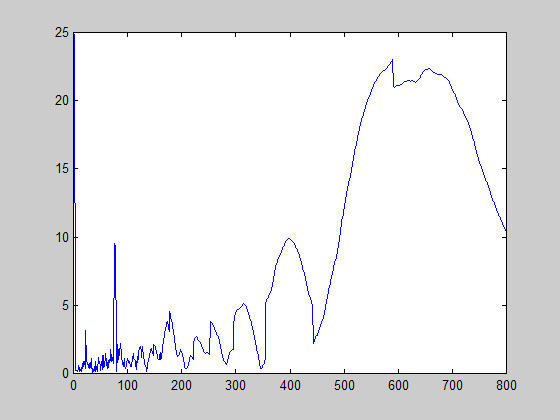
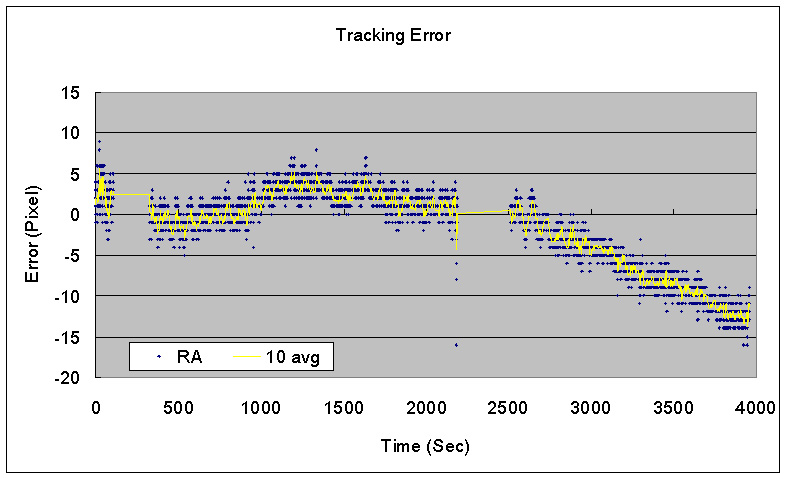
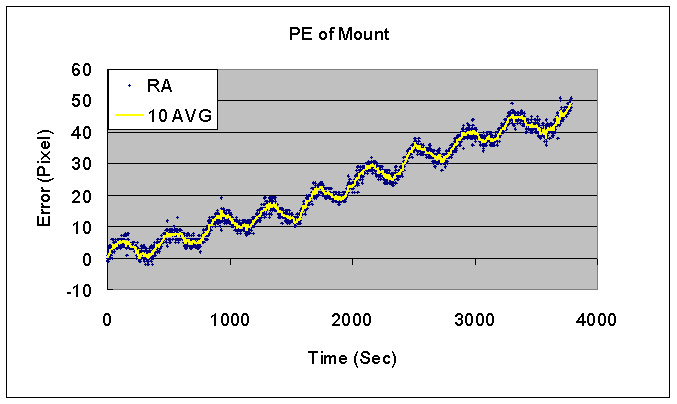
2006年10月28日天气晴好,赴麻峪房观测游玩。29日凌晨在4点半到5点之间拍摄暗场的30分钟里记录了驱动的误差,目标星在赤道附近,6个测量值求和,记录取样间隔2秒。蓝色曲线是赤经方向,红色曲线为赤纬方向。
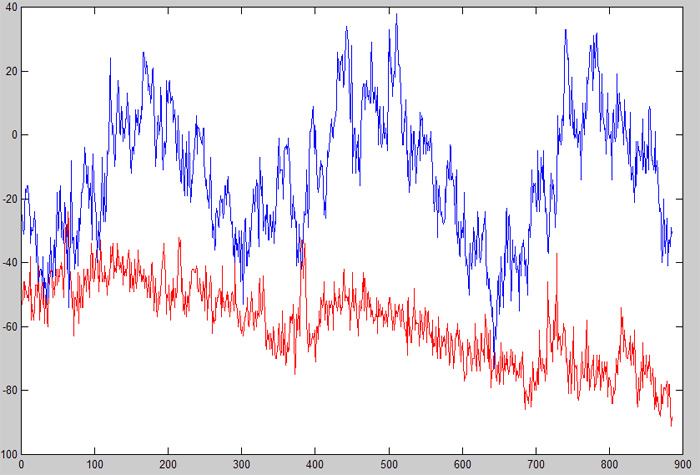
对赤经误差分析,有三个明显的周期项。一是早已注意到的76秒周期,二是蜗轮的600秒周期(陡降是积分区间从3个周期减到2个周期的缘故),最后一个400秒的周期从何而来尚不知道。在赤纬曲线上有600秒周期的尖峰,是否由于上次的死锁对蜗杆造成损坏?但从照片上看导星之后赤纬方向没有明显的问题。