
步进电机细分驱动
现在赤道仪的机械减速比为8640=216*40,步进电机转速0.1rps,合10pps。使用8435单极驱动最高8细分,在正常跟踪时基频80Hz。使用中发现在此速率下用手放在赤道仪上可明显感觉到震动。
为此重新设计了一个驱动电路。
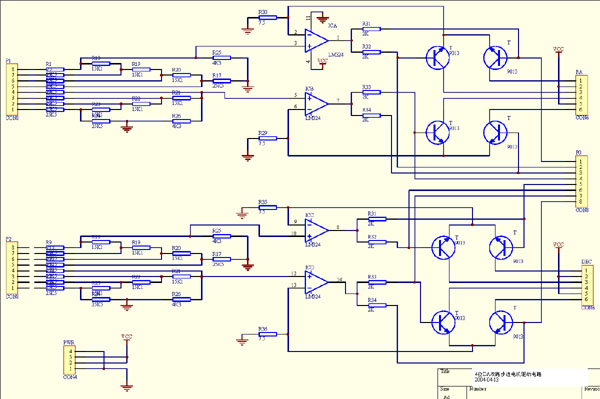
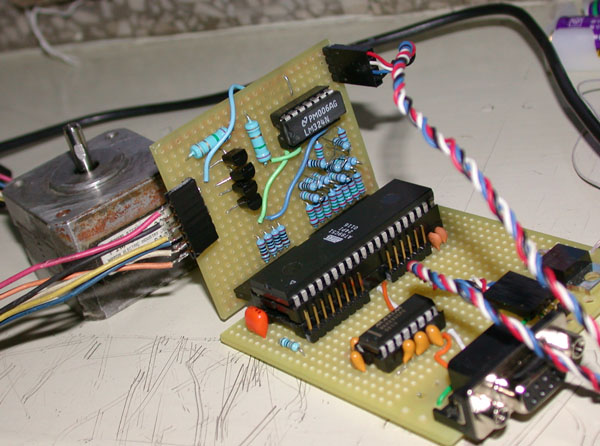
这是一个使用DA方式的32细分电路。通过AT89C51可控制2个步进电机。P1,P2分别提供参考电压,P0控制晶体管开关。P3和串口用来提供控制指令。
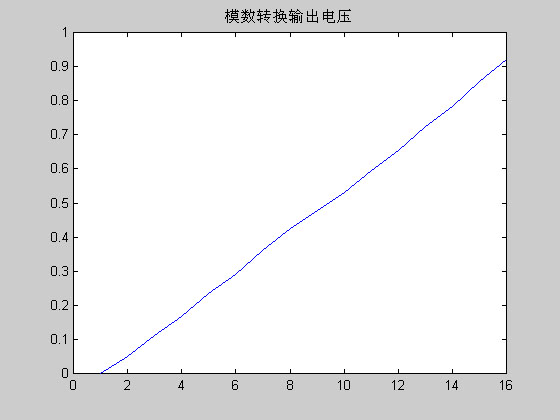
DA部分为4位,接到T型电阻网络上提供参考电压输出。
这个4级T型网络的各点输出电压如下图:
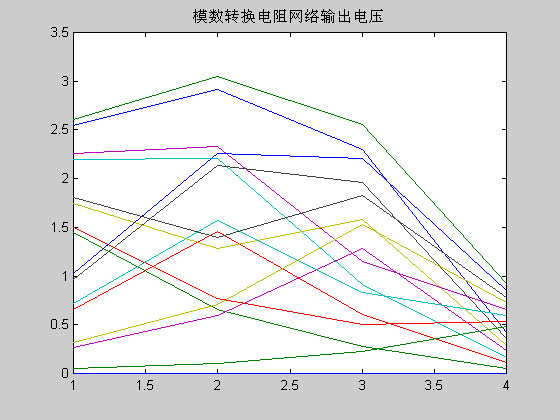
由于P1,P2内的上拉电阻(实测AT89C51 24PI 为8.4K)的影响,输出并不完全线性。
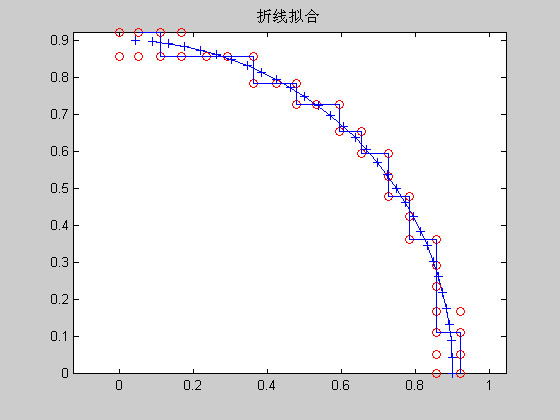
利用这16个离散电压用折线拟合32细分的矢量:
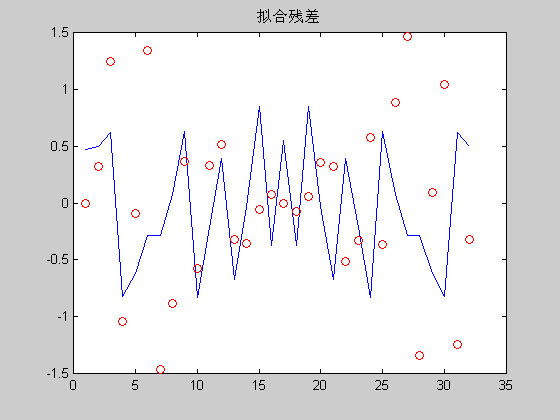
拟合误差估算:红色为角度偏差,在+-1.5度左右;蓝色为幅度偏差X20,在5%左右。
最后的转动矢量图:
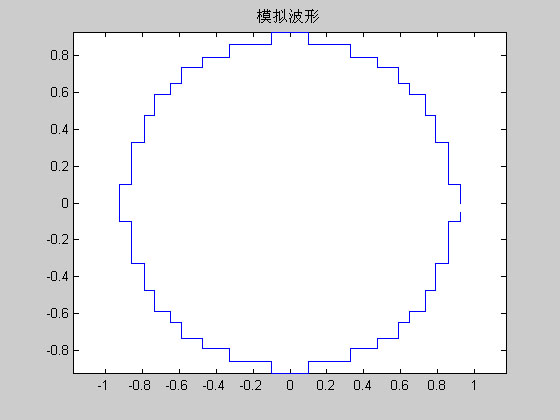
这个电路实测在5V电源下工作,震动明显减小。最高速度32倍速(12欧姆线圈电阻)。
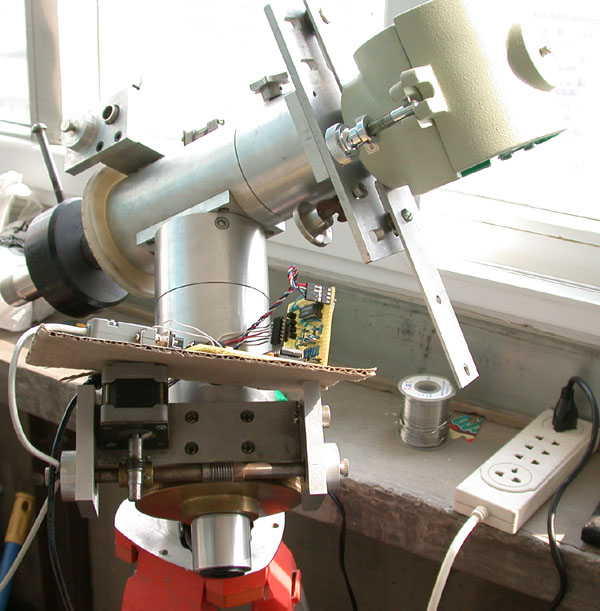
电路用手头的元件搭建,优点是成本低廉(8x9013, 1xLM324, 1x89C51,1xMAX232),缺点是电阻贼多。
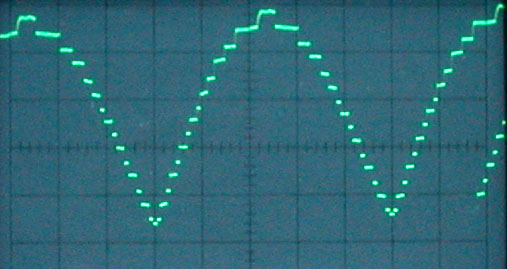
题图:实测取样电阻波形